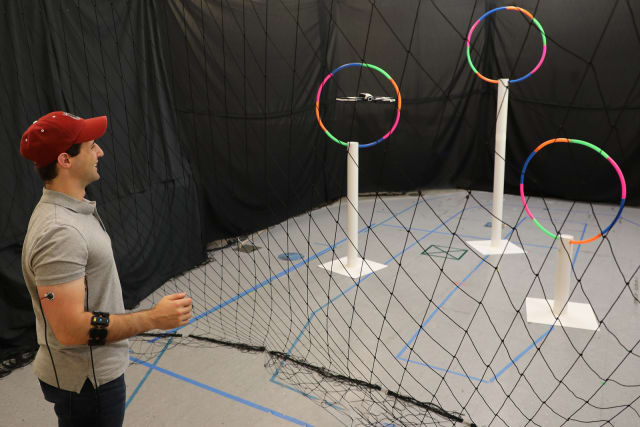
ممکن است وجود دارد یک راه بصری برای کنترل روبات ها و هواپیماهای بدون سرنشین از waggling جوی استیک و یا بهره برداری در یک صفحه نمایش. MIT CSAIL محققان یک روش کنترل رفتار یک ربات است که با استفاده از عضلات و سنسور تشخیص حرکت برای 'طبیعی' ربات کنترل. الگوریتم های تشخیص حرکات با استفاده از هر دو جنبش خود را به عنوان به خوبی به عنوان فعالیت خود را در عضلات دو سر بازو, ساعد و پشت بازو. شما می توانید موج دست خود را گره مشت خود را و یا حتی زمان بازوی خود را برای هدایت ربات.
این سیستم نیاز ندارد محیط زیست نشانه های آفلاین کالیبراسیون یا هر فرد آموزش. شما فقط می تواند شروع به استفاده از آن در دیگر کلمات.